








目录
几何
几何表示方法的分类
- 隐式
- 可以通过一个函数来表示的几何体。
- 例如圆可以表示为f(x,y,z)=0
- 优点:可以很容易判断某个点是否在几何体上
- 缺点:难以通过函数判断出几何体的真实形状
- 显式
- 通过参数映射表示的几何体(uv坐标转换为xyz坐标)
- 参数映射:通过某个带有u,v的函数分别表示出x,yz的坐标
- 直接给出几何体
- 缺点:难以表示出某个点是否在几何体上。
- 优点:容易看出来几何体的真实形状
- 通过参数映射表示的几何体(uv坐标转换为xyz坐标)
隐式表示
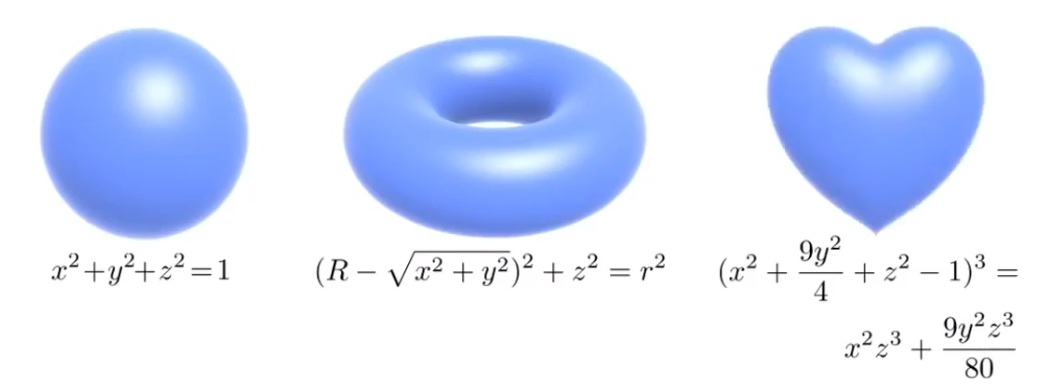
对于复杂的几何体十分不友好。
隐式几何
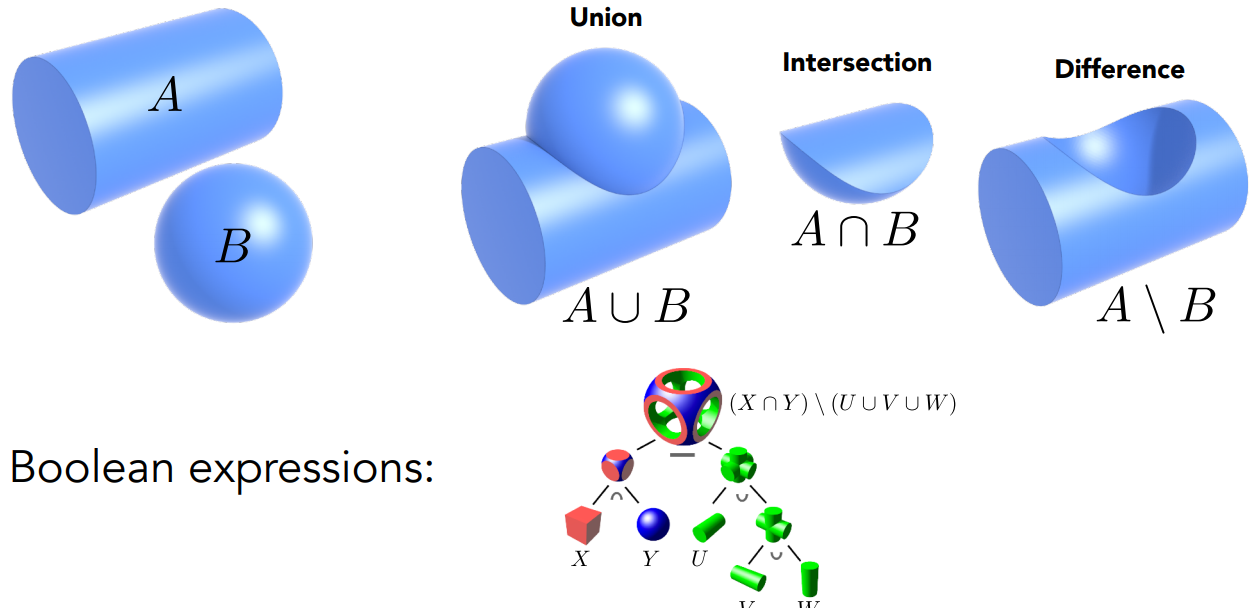
CSG(Constructive Solid Geometry)
复杂的几何体通过简单几何体进行集合运算(交并补)得到,该操作被称之为CSG。
距离函数
下图A与B相进行融合操作后得到blend(A,B),左边三分之一完全被挡住,中间被挡住一半,最后边完全没被挡住。
距离函数:任何一个点到达边界的最短距离。
通过AB距离函数相加得到融合后的SDF图,可以转化为blend(A,B)这张图。
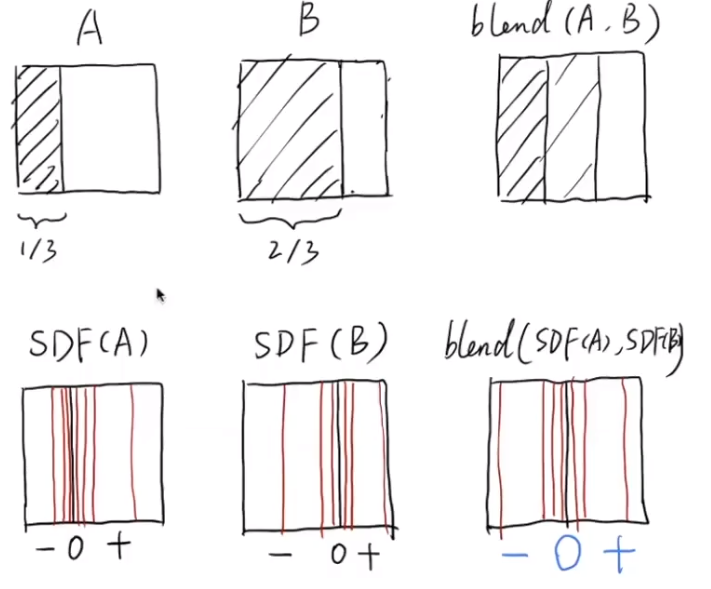
距离函数可以将两个靠近的集合体进行融合。

距离函数通过水平集(LevelSet)得到F(X)=0(边界)
分型

分型这种递归问题在渲染中会引发严重的走样
显式几何
点云
- 用密集的点放在空间中
- 是某个坐标系下的数据集
- 每个点包含了坐标、颜色等一系列信息
- 只要采样足够密集,理论上可以表示任意集合体
- 如果采样不够密集,将会无法分辨模型的形状
- 应用:激光扫描
多边形网格
简介
- 讲面拆解为多边形(大多是三角形和四边形),存储顶点和多边形信息
- 在图形学中应用的最为广泛
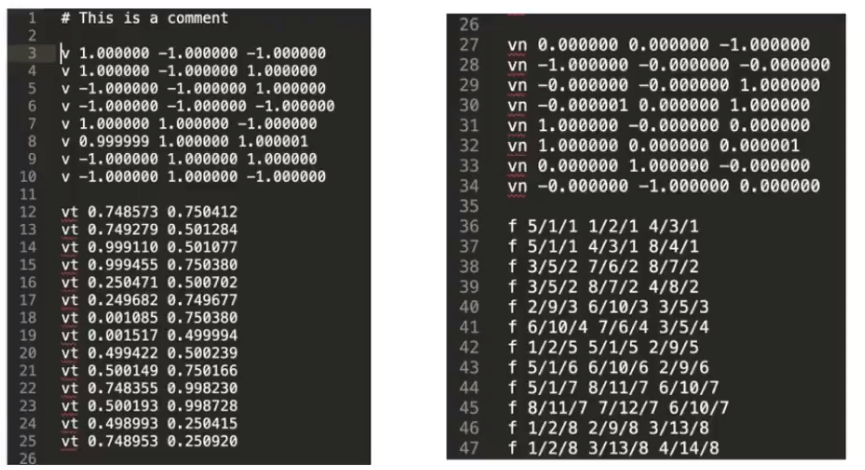
如何储存多边形信息?
使用OBJ格式讲几何体的点、法线、纹理坐标分别表示,然后再表示,面与面的连接关系。
下图定义了一个立方体,有八个顶点(V),六个面(Vn)多个纹理坐标(vt)表示,然后使用f表示他们之间的关系((f V/Vt/Vn)
贝塞尔曲线
只要求一定要经过起止点,起止点之间的若干个控制点用于控制曲线弯曲的方向,最终形成一条经过起止点的光滑曲线被成为贝塞尔曲线。
德卡斯特里奥算法
通过德卡斯特里奥算法法来绘制贝塞尔曲线。
- 引入参数t(范围 为0-1)
- 取b0到b1,b1到b2上t位置的点b0‘,b1’
- 将b0‘,b1’连接
- 取b0‘到b1’t位置上的带你b0‘’
- 将所有的0-1所有的b0‘’点都遍历一份相连即可得到贝塞尔曲线
- 若有n个控制点则将上面步骤进行递归操作直到找到最终位移b0n

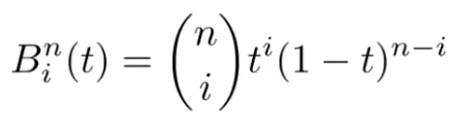
总结得到公式:bn(t)=b0n(t)=Σb0Bn(t)
可以求得一个以t为自变量的函数,由这些点形成的集合构成贝塞尔曲线
其中:
- b为n个贝塞尔控制点
- Bn为伯恩斯坦多项式
其中:
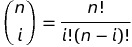
(排列组合Cni)
例子:b0、b1、b2、b3为3d空间中的点,通过函数求得n个离散的点
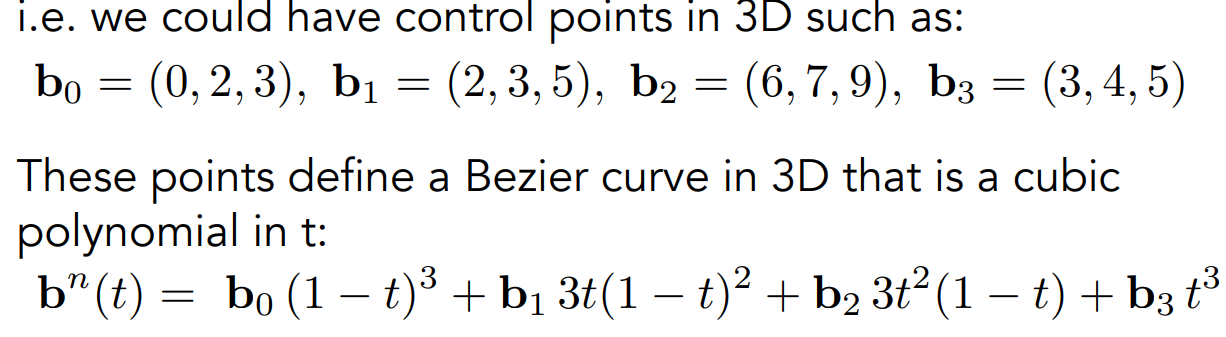
- 对贝塞尔曲线做仿射变换只需要对控制点、起止点做仿射变换再重新绘制一遍即可。
- 对投影变换没有这样的性质
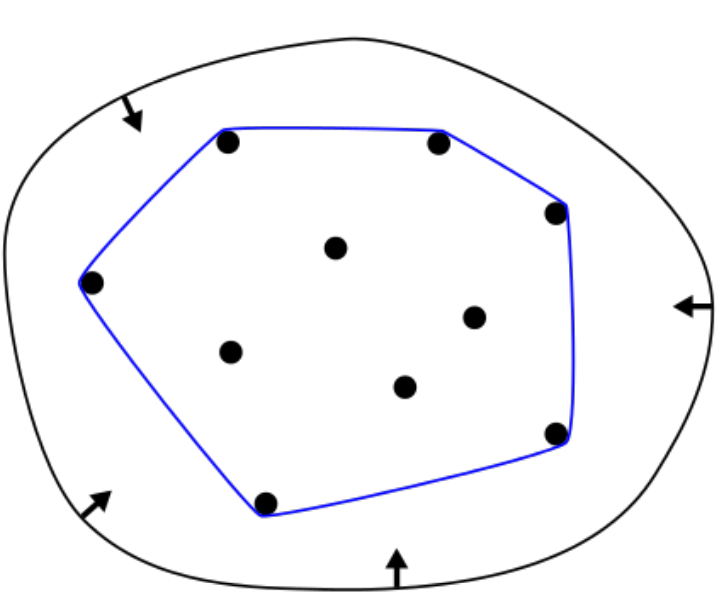
凸包
贝塞尔曲线拥有凸包的性质。
连接贝塞尔曲线最外围的控制点,将其相互连接形成一个封闭空间,画出来的贝塞尔曲线一定在凸包范围内。
若贝塞尔曲线是一个直线则凸包也是一个直线。
逐段贝塞尔曲线
当控制点太多会影响控制点的效果。
每四个控制点定义一条贝塞尔曲线,然后再将他们连接起来。
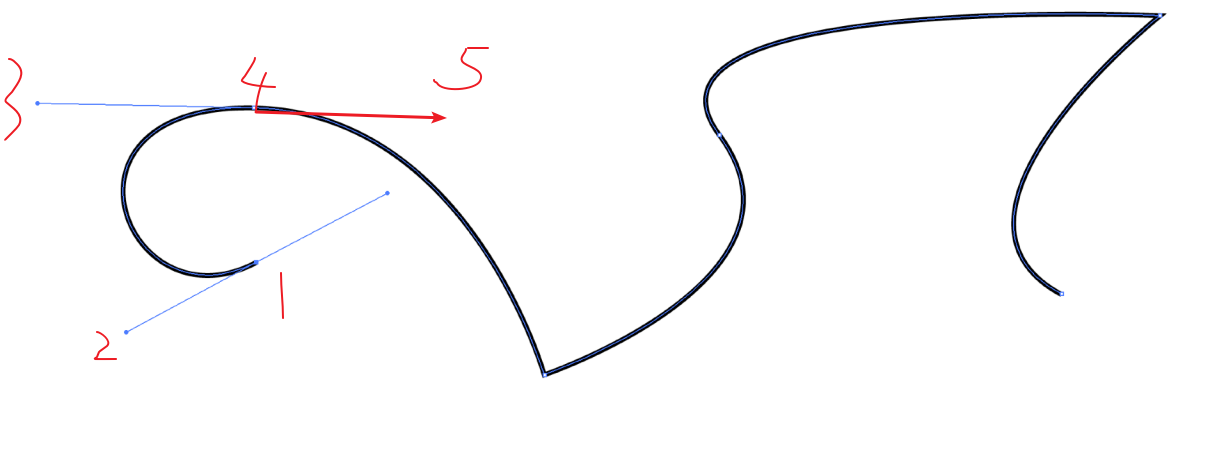
类似PhotoShop的钢笔工具
若想要逐段贝塞尔曲线平滑过渡则需要将相邻控制点共线(如3,5)否则会出现该曲线后边段的不平滑现象。
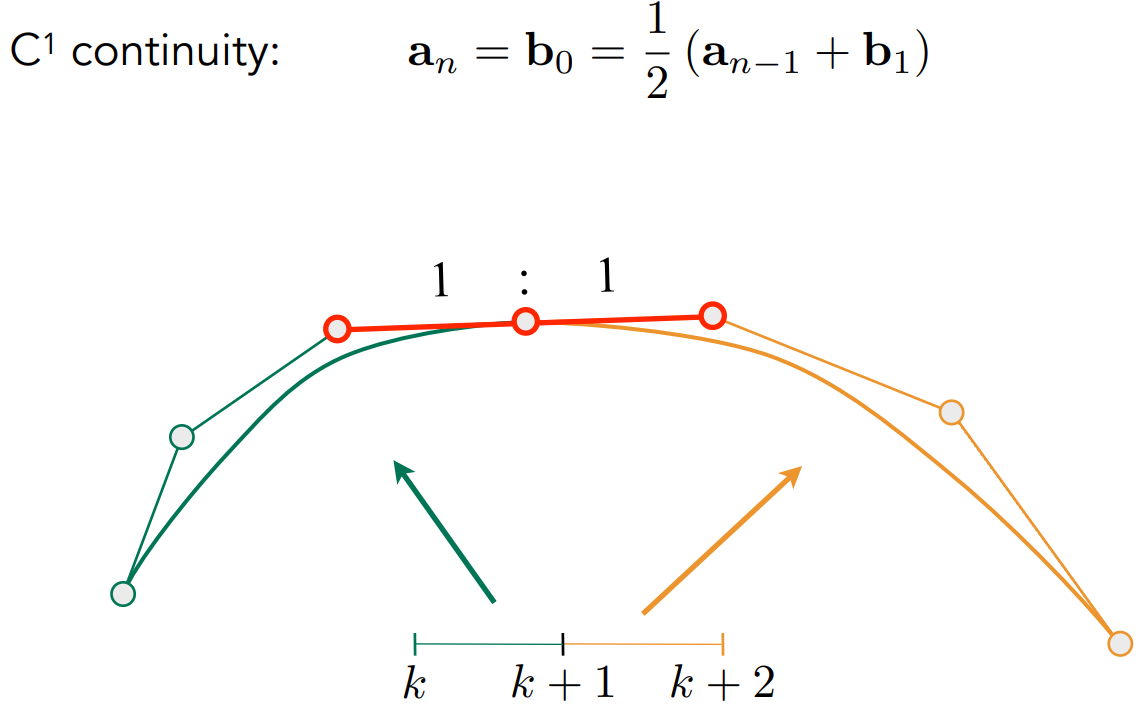
CN连续
将两个逐段贝塞尔曲线中的两部分连接,连接点被称之为C0连续
若相邻两个控制点距离连接点相同且共线则该连接点被称之为C1连续(再连接处一阶连续可导)
贝塞尔曲面
与二维的贝塞尔曲线思想类似,但是需要定义两个参数u和v(取代之前的参数t)
先对f(u)进行遍历得到曲线,再嵌套遍历得到曲面f(u,v),类似于两层for循环进行遍历
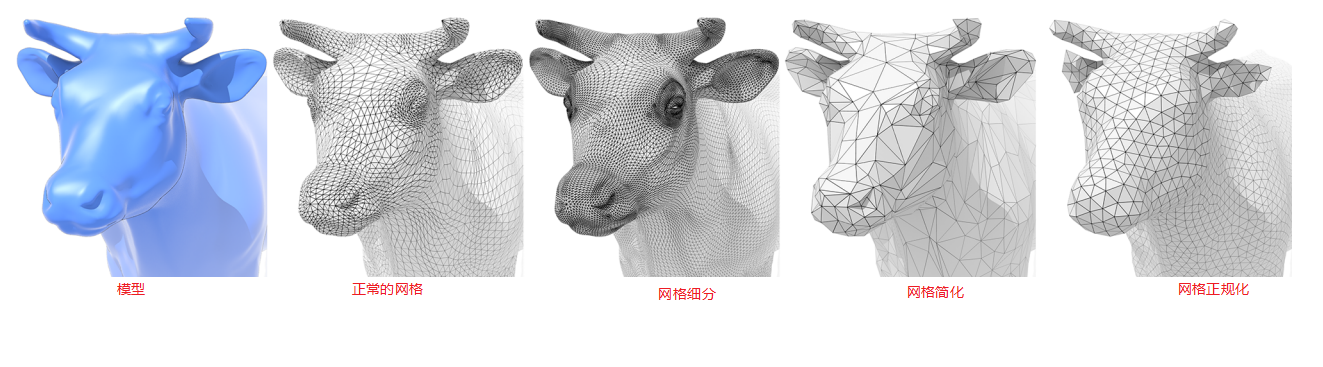
网格操作
网格操作的分类
- 网格细分
- 让网格的面数更多
- Loop细分
- Catmull-Clark细分
- 网格简化
- 让网格面数更少
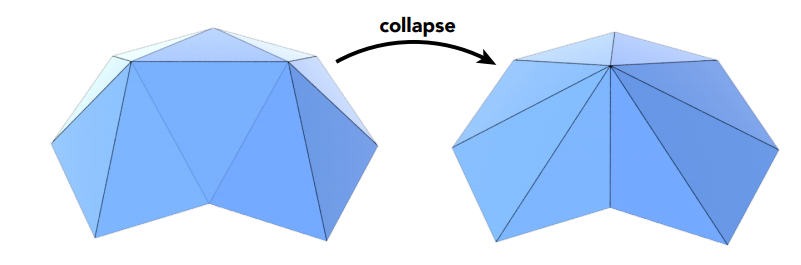
- 边坍缩
- 通过“二次误差度量”得到坍缩后最优的点
- 网格正规化
- 让网格中的三角形趋近于正三角形
Loop细分
- 将每个三角形变为4个三角形
- 根据权重指定新的顶点位置
- 新的顶点和老的顶点以不同的规则来改变自己的位置
对于新的顶点:
V'=3/8 * (A + B) + 1/8 * (C + D)
- V'为新的顶点变换后的位置
- A、B分别为于两个面被共享边的的老顶点
- C、D为非共享边的两个顶点。
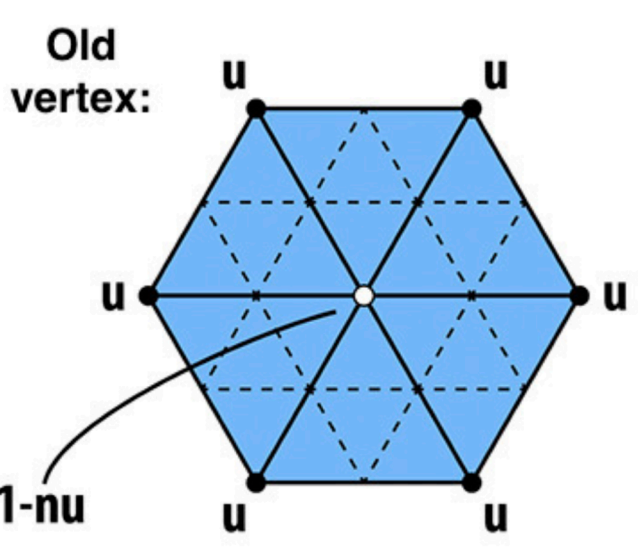
对于旧的顶点:
V'=(1 - n*u) * V + original_position * neighbor_position_sum
- V'为旧的顶点变换后的位置
- n为顶点的度(链接的顶点数)
- 如果n=3则u=3/16 其他情况u=3/(8n)
- neighbor_position_sum为邻居点的平均位置
- original_position为旧顶点原本的位置
问题:只能对完全为三角形的几何体进行细分
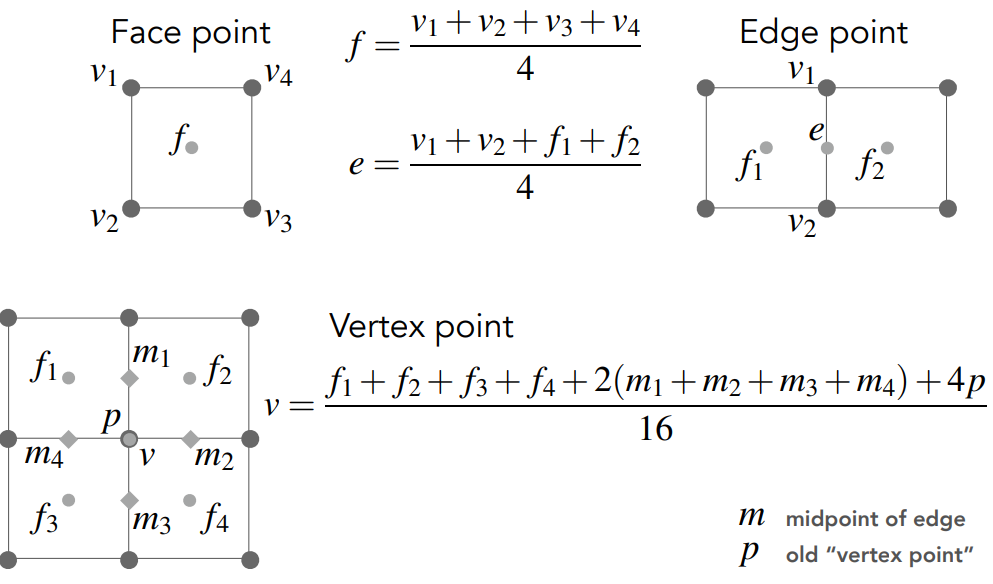
Catmull-Clark细分
相对于Loop细分的优势:可以用于任意不同的面的细分。
奇异点:顶点的度!=4
- 将面的中点和面上线的中点连起来
- 在第一次细分之后,非四边形面数量会加到原本奇异点的数量上
- 面上的中点(f)、边上的中点(e)、老的顶点(v)变化情况如下图
边坍缩算法
通过不断迭代进行边坍缩操作达到简化模型的目的。
边坍缩面临的问题:
- 坍缩哪些面?
- 如果优先坍缩不重要的面,那如何界定不重要?
- 坍缩后的顶点位置如何描述
二次误差度量
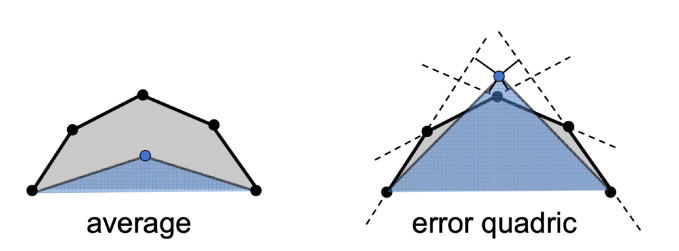
如果将减面时候的点直接平均将会得到左边的图,显然不理想。
通过二次误差度量得到右边的点得到理想效果。
边坍缩算法的步骤
- 对每一条边打一个分数,分数就是他坍缩后的二次误差度量
- 对分数最低(误差最小)的边做边坍缩
- 用到了Dijkstra最短路径算法
- 重新执行第一步知道完成整个模型的边坍缩
阴影映射(Shadows mapping)
基本流程
- 从光源看向场景并做深度测试
- 从视锥体位置看向场景,从场景中看到的点投影回光源得到该点在深度图中的位置
- 有些点可以被视锥体看到也可以被光源看到(视锥体投影到的深度图与光源中的深度图相同)
- 有些点可以被视锥体看到但不能被光源看到(视锥体投影到的深度图与光源中的深度图不符)
- 不能被光源看到的位置但可以被视锥体看到的位置就是阴影的位置
出现的问题
- 只能做硬阴影不能做软阴影(目前以及有技术可以做到)
- 由于shadow map的分辨率问题,阴影可能出现锯齿
- 浮点精度问题,可能在是否能同时被视锥体与光源看到的界定上出现问题引发误差
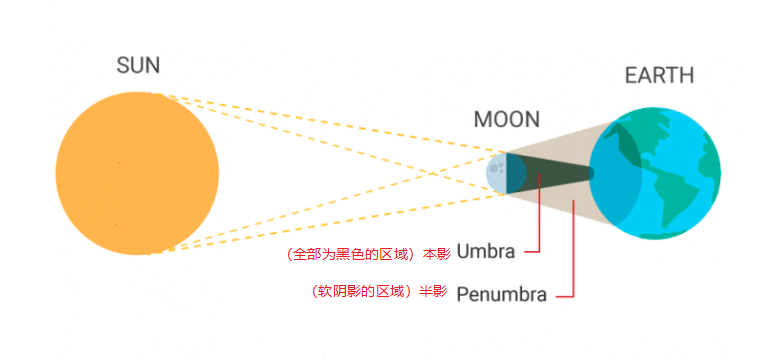
软阴影
软阴影的边缘比较模糊,没有硬阴影锐利的边缘
下图以日食为例子介绍了软阴影在真实物理中形成的原因:
参考资料
完整笔记
- 度盘链接
- 提取码:njcf


 加油
加油


